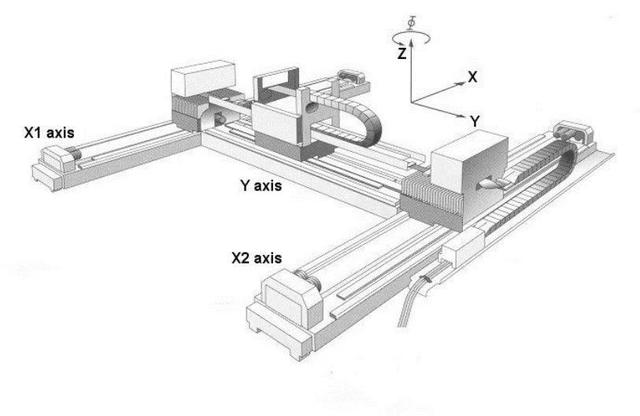
龙门结构平台介绍——驱动控制篇
时间:2023-06-08来源:佚名
|
常见的龙门控制方法
1、单反馈—单电机 只在其中一边有电机提供动力,另一边则由导轨支撑,通过机械应力来运动。 优势:比较经济 劣势:控制性能差,容易对机械造成损伤
2、单反馈—多电机 相当于把两个电机并联,一组信号同时控制两个电机。 优势:推力可以耦合至龙门轴中心,减少机械刚性差较弱的影响。 劣势:对机械安装和电机一致性要求非常高,很容易因此导致控制问题差。反馈的中心和龙门轴中心并不共线,导致控制性能不足,限制最终控制精度级别。 3、主从控制 通过控制器来协同两个驱动器同步运动。 优势:在低速场合效果比较好,工程实施性价比较高。 劣势:在高速运动场合同步性能会变差,轴间耦合影响较大,不适合高动态龙门控制。 4、交叉解耦算法 在驱动器层面进行龙门的交叉解耦控制,进行龙门双轴电机、耦合后反馈的自动控制,有龙门轴控制刚性的独立PID参数。甚至可以进行偏摆角的动态控制 优势:可以更大程度提高控制性能。可以解决龙门机械耦合的问题。控制器层面开发简单,易操作。 劣势:需要较大的运算量,对控制器和驱动器要求较高。 |