电机电磁感应引起振动和噪声的原因
|
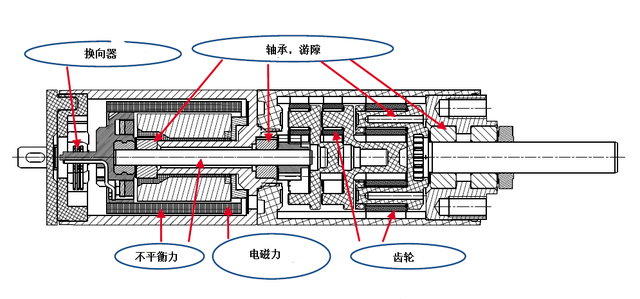
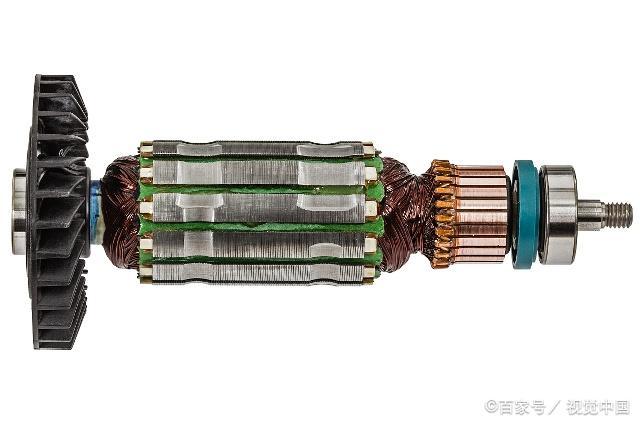
在每台电机中,除了期望的力、转矩和运动之外,不可避免地会产生不希望的力、转矩和运动,不期望的波动(振荡转矩)叠加在期望的电机转矩上,导致了旋转运动的振荡。不平衡和磁效应会引起的径向力导致径向运动,以时间波动的摩擦力出现在轴承和滑动接触面上,会引起不希望的运动。 当齿轮箱安装在设备中时,齿轮会引起不希望的旋转振动。所有这些运动都构成结构噪声,并以此传递到电机的振动表面。下图显示了电动机中可能产生振动和噪声的主要位置的典型示例。
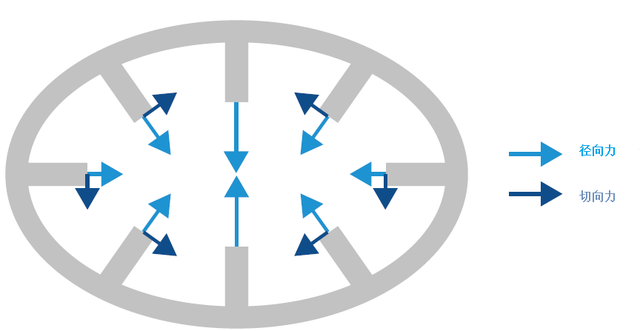
每台电机的表面和轴也会以不希望的方式移动,这是由于出于功能上原因而使用异极概念的结果,与单极电机相比,异极概念具有显著的优势。电机转矩所需的磁能密度分布在定子与转子之间的气隙中,其必然会在时间和空间上发生波动 。槽口(磁性气隙的磁永久性分布)、永磁体的设计、载流绕组的分布、电流的施加方式以及电流随时间的曲线都是引起这些波动的因素。在转子的外周表面和定子的气隙侧,随着时间的推移,空间能量密度分布的波动会导致施加于不同位置的切向和径向力波动。
如果电机设计适当,转矩内切向力的波动影响很小,当它们沿圆周方向相加时,大量的局部波动会随着时间而相互抵消,振荡力矩就可以保持在较低的水平,这也适用于装有永磁体的电机的齿槽转矩。然而,局部引起的切向力波动会引起切向弯曲变形振荡——例如,在定子和转子的齿槽上,径向磁场张力的分布引起定子和转子的径向运动和变形。根据这些力的空间分布的性质,可以是静止,也可以是周向位移或振动运动。在定子和转子中,这些运动的位移是不同步的,总的重心保持不变。
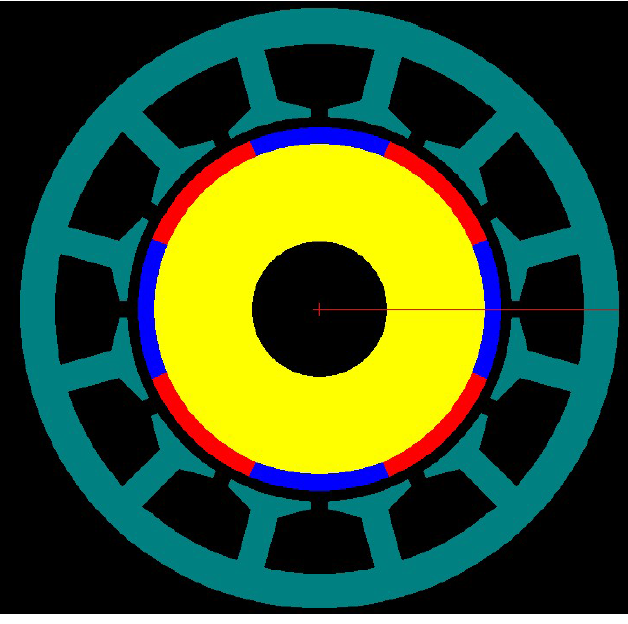
轴的挠曲和轴承盖的变形具有r=1的模态序数或定子的椭圆、三角形或多边形弹性变形(r=2, 3,…),在这种情况下,转子几乎没有变形,因为它的径向弯曲刚度较大。定子的变形可以随时间而变化,这取决于力的分布,可以是周向的,它可以振荡,通常,具有多个模态阶数r的运动在定子处重叠。对于小型电动机,只有r=1的运动是不受欢迎的,因为小型电机很小,并且固有足够的刚性。对于大型电机,r>1的运动是比较好的选择,但对于r>4的电机,这种情况就很少。
r=1的运动通常是转子在定子中偏心位置导致的,偏心位置可能是静态的,例如当转子轴承在定子中的位置是偏心的或圆周的,跟弯曲轴的情况一样。它们产生的力是谐波或脉动,通常会带有若干次谐波,力的方向以空间固定的径向和/或周向为主,即方向是旋转的。在最坏的情况下,所有的运动频率都在人耳可听见的范围内。
结论 在使用永磁体的电机(直流电动机、步进电动机、同步电动机)中,除了所需的转矩外,还会产生“齿槽转矩”。这种齿槽转矩发生在无电流状态下,这是由于永磁性随转子位置而变化的结果。在运行中,齿槽转矩叠加在所需转矩上,该转矩不会随时间变化,并导致转矩产生波动或纹波。根据“每一个动作都有一个相等和相反的反作用力”定律,交变力作用在定子上,其借助所使用的安装系统,该力在电机安装位置表现为振动力。 |