BLDC 电机控制两个模式梯形和正弦之间的区别
|
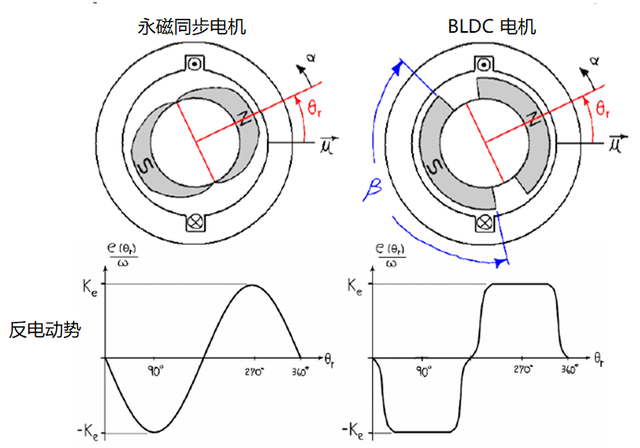
无刷直流电机用于各种电器,如交流电、洗衣机、消费电子产品等。平均而言,有刷电机的使用寿命约为 1000 到 3000 小时,而无刷电机的使用寿命为 10000 小时,无刷直流电机属于两类之一。梯形或正弦,这种区别是指电机的反电动势 (Back-EMF),是通过每种电机类型中使用的绕组和磁铁类型产生的,梯形电机通常简称为 BLDC 电机,而正弦电机通常称为 PMSM(永磁同步电机)。
使用无刷电机技术,可以在应用中获得高可靠性和效率;与有刷电机相比,它的成本也更低。无刷直流电机和永磁同步电机(PMSM)都具有无刷特性,这两种电机都是同步电机,它们之间的区别很小。区别在于它们的反电动势的形状。BLDC和PMSM电机分别具有梯形和正弦反电动势,实际上电机不能产生完全梯形的反电动势,但它更像是正弦曲线。所以有时电机的类型并不重要,但换向(控制)方法更重要。
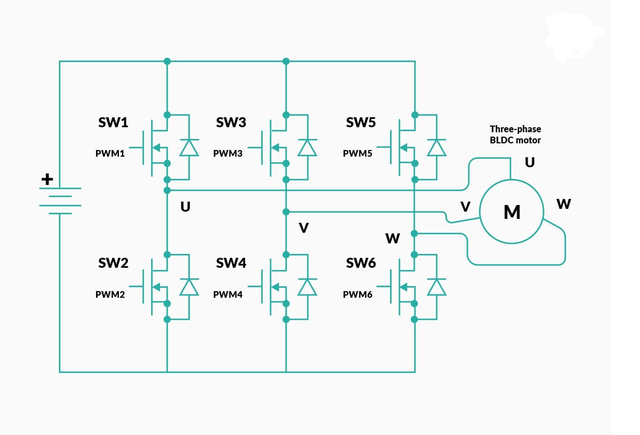
尽管无刷直流 (BLDC) 电机的反电动势波形在理论上是梯形的,但实际上,电机中的电感可将反电动势平滑成更正弦的形状,这就是 BLDC 电机可以使用梯形或正弦换向方法的原因。虽然梯形换向是两种方法中较简单的一种,但它在每个换向步骤(每 60 度)都会产生明显的转矩波动。正弦换向消除了梯形换向固有的转矩脉动,并提供平稳的运动和精确的电机控制。驱动任一类型电机的最有效方法是将换向方式与电机绕组方式相匹配。电机数据表应列出反电动势或绕组样式,如果未提及,可以使用从一相连接到另一相并手动旋转电机的示波器来测量反电动势。 正弦换向背后的基本前提是为每个电机绕组提供随着电机转动而呈正弦变化的电流,电流相移 120 度,以匹配定子绕组的方向。电流空间矢量具有恒定大小并且始终与转子正交。 (回想一下,当定子和转子磁场相互正交或成 90 度时会产生最大转矩。)实现正弦换向的关键是能够准确确定转子位置,由于霍尔器件仅提供转子位置的粗略测量,因此通常使用编码器来提供转子位置信息。 根据转子位置,创建两个正弦波形,相移 120 度,将这些信号乘以扭矩命令会产生与所需扭矩成比例的幅度,这些命令被馈送到控制器,控制器调节电机绕组中的电流。根据基尔霍夫电流定律,三个电流之和必须为零,因此第三个电机绕组中的电流是前两个的负的(以保持三个的和为零),因此,不能直接控制。 定子绕组电流必须与其反电动势具有相同的形状才能获得最大效率,驱动电流从逆变器提供给三相电机,具体取决于施加在其上的 PWM,PWM 使用控制器产生。定子绕组电流根据转子位置变化。转子位置由霍尔传感器、QEP 编码器或任何其他数学方法获取。根据电机的反电动势,使用不同的方法产生驱动电流。
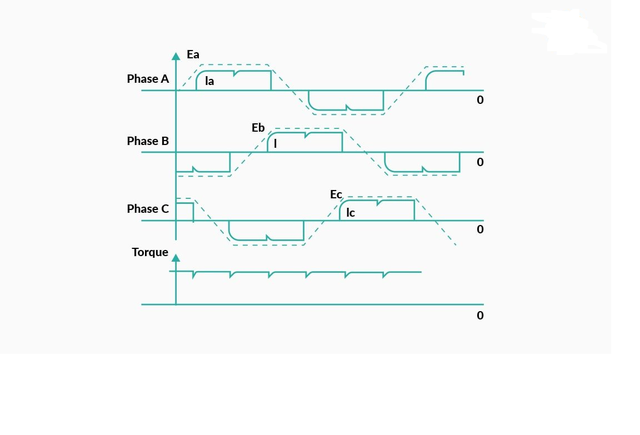
梯形控制 梯形换向方法定义了反电动势的形状和驱动电流波形,为了从电机获得最佳性能,驱动电流应与反向电动势波形相匹配。由于 BLDC 电机的反电动势呈梯形形状,因此应使用梯形电流驱动以获得最佳性能。梯形换相也称为“六步换相”,因为完成转子一圈所需的驱动电流共有六步。在梯形控制中,一次只有两个相位处于活动状态。该方法控制算法简单,但电机在每次换向(60度)时都存在转矩脉动。
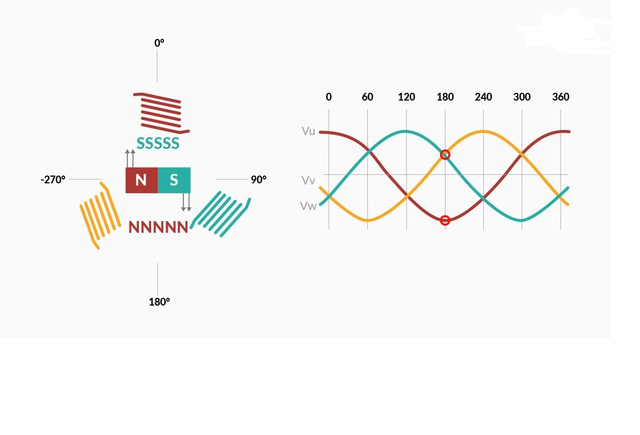
优点:控制算法很简单、一次只需要两个阶段即可激活、更少的开关损耗。 缺点:每次换向时的转矩波动、产生的扭矩更少、声学和电噪声。 正弦控制 正弦换向用于永磁同步电机,因为 PMSM 电机具有正弦反电动势,虽然理论上 BLDC 电机的反向电磁力波形是梯形的,但电机中的电感使其平滑成正弦形状,这就是为什么 BLDC 电机可以使用两个梯形或正弦换向方法中的任何一种。 顾名思义,在这种方法中,反电动势和驱动电流的形状是正弦的,正弦控制消除了转矩脉动并提供平稳运动。正弦换向的基本原理是提供根据转子位置而变化的正弦电流,电流相移 120 度。正弦控制是通过使用磁场定向控制算法实现的。该算法的基本原理是当转子和定子磁场相互正交时产生最大转矩。因此,正弦电流会根据转子位置而变化,以获得最大扭矩和平稳运动。
优点:换向无转矩脉动、平滑运动、产生最大扭矩。 缺点:可以同时拥有三相、更高的开关损耗、控制算法复杂且数学模式复杂。 实际上,BLDC 和 PMSM 电机可以通过任何两种方法运行,因为如前所述,我们没有得到完全梯形的反电动势,但它看起来有点像正弦曲线。虽然正弦控制算法实现起来很复杂,但为了在应用中获得最大转矩和平滑运动,应该使用正弦控制。在转矩较小的应用中,使用梯形控制的简单控制算法驱动电机是一个更好的主意。 结论: 正弦换向的缺点是它在高速时效率低下,电机转动得越快,正弦信号的频率就越高,控制器很难跟踪这些高频信号。更高的电机速度也会导致反电动势的幅度和频率增加,从而使电机更难以克服。这两种情况都会对电流控制回路造成干扰,并导致电流出现相位滞后和误差。结果是电流空间矢量相对于转子远离理想(正交)位置,并且给定电流量产生的转矩较小。 |