电机为何要配合直齿式和行星式齿轮箱使用,有什么优点?
|
电机应用在速度和转矩比值方面均有功率要求,如果负载要求在低速度时产生高转矩,使用大型电机去达到这种转矩显然不合算,而且系统效率也极其低下。在这种情况下,在电机和负载之间引入某种齿轮是一种更好的解决办法。齿轮可以让电机适应负载,无论是在速度、转矩还是惯量方面。基于电机齿轮箱解决方案提供传动系统,由金属或塑料齿轮组成的齿轮系统,电机-齿轮箱组合将带来更高的效率,是一种具有经济效益的解决方案。
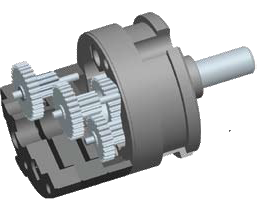
齿轮箱类型 直齿式齿轮的减速齿轮箱:这种齿轮技术在限流应用中更具优势,因为应用要求最低的输入摩擦和较高的效率。
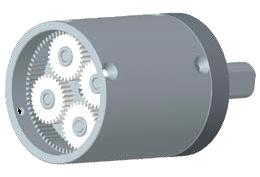
行星式齿轮箱:较高的额定转矩,以及更高的每齿轮系减速比,两种类型都采用了优质的合成材料,全金属行星式齿轮箱设计紧凑,具有优异的性能和使用寿命。
高速行星式齿轮箱:这个高性能的产品系列旨在与带铁芯线圈的 BLDC 电机配合使用,齿轮箱可耐受的输入速度范围是 10,000 至 70,000 rpm,而可耐受的输出速度约为 1,000 rpm 的数倍。这有利将电机-齿轮箱系统控制在极小的尺寸,但却能提供极高的速度或转矩值。 齿轮箱的基本工作原理 直齿式齿轮箱的原理:半径 r1 和齿数 z1 的小齿轮驱动半径,r2 和齿数 z2 的输入轮,每个齿轮系的减速比 “i” 为 z2:z1,等于 r2:r1,每个齿轮系只有 1 个传动点。低摩擦齿轮系,可设计安排多个齿轮系输入和输出轴无须在一条直线上可有两根输出轴。效率高,每齿轮系约 90%,小直径长齿轮箱或者大直径短齿轮箱,按输出轴自由,可自由选择电机位置、安装传感器、电位器等。
行星式齿轮箱的原理:有“S”齿的小齿轮 S(=太阳)驱动有“P”齿的行星 P(每个齿轮系 3 或 4 个),并固定到直齿和行星齿轮架上。A = 带“a”齿的固定齿圈,每个齿轮系的减速比为 i = (a:s) 1。每个齿轮系 3 或 4 个传动点,齿轮系减速比较高,但摩擦大,可传递较高扭矩齿轮系输入和输出是相同旋转方向,较少的齿隙。对于指定的减速比有较少的齿轮系,每个齿轮系的效率约为 85%,性能出色又紧凑的齿轮头,对于任何齿轮系数目,负载旋转向始终与电机相同,电机快速倒转时冲击较小。
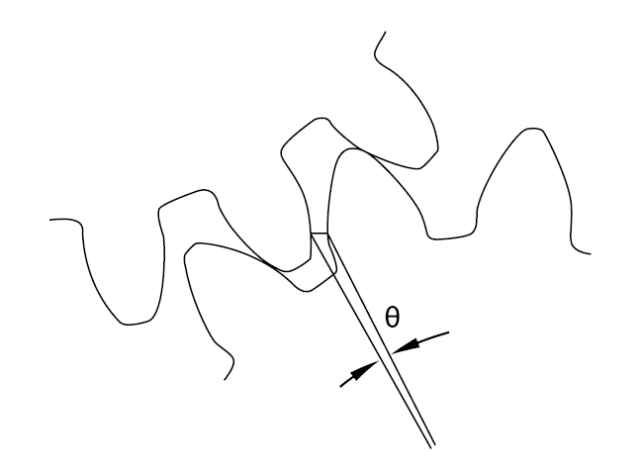
如何选择齿轮箱 除了动态输出转矩外,在挑选与 电机配合工作的齿轮箱时还应考虑的下面要素: 旋转方向:它表示输出轴杆相对于电机的方向(= 或 ≠)。在行星式齿轮箱中,无论齿轮系有多少,输入和输出的方向始终相同。 效率:它主要取决于齿轮系的数量, 它是在环境温度为 20 到 25°C 时的平均测量值,新齿轮箱的值较低,但在工作一段时间后将达到正常值。 最大静转矩:这是堵转可承受的最大转矩,超过此限制,齿轮箱可能损坏。 最大建议输入速度:它对于齿轮箱的噪音级和使用寿命有很大的影响,并且在根据不同应用选择降速比时,应考虑这个因素。 齿隙:这是在阻断输入时,齿轮箱的输出轴杆可自由旋转的角度,它的主要决定因素包括:避免齿轮阻塞的必要齿轮间隙、转轴间隙以及轮齿和轴杆在负载下的弹性形变。由于它受制于负载,因此可得出带/不带负载转矩的两个值。实际上,齿轮系的反向间隙是随着减速比的减小而出现在输出轴杆上。与此相反,输出轴杆的反向间隙是随着减速比的倍数增加而出现在输入轴杆上。对于 100: 1 的比例,1°的反向间隙代表在输入时旋转 100°,而且每次电机反转时,只有捕捉到这 100°度的旋转后输出才会开始旋转。
结论: 一旦选择了gearmotor并将其安装到应用程序中,就可以在模拟环境中执行多个测试运行,如果仿真显示异常高的热量、噪音或应力,请重新选择齿轮或联系制造商。对于少量定制变速箱,请寻找利用最新的CAD软件、CAM软件和机床仿真后处理并降低制造和设计成本。 |