步进电机驱动有哪些方式?
|
步进电机需要一些外部电气元件才能运行,这些部件通常包括电源、逻辑排序器、开关部件和决定步进速率的时钟脉冲源。许多市售的驱动器已将这些部件集成到一个完整的封装中。一些基本的驱动装置只有最后的电源阶段,而没有产生适当步进顺序的控制器电子元件。
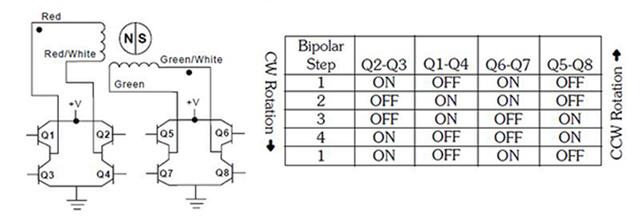
双极驱动 这是一种非常流行的驱动装置,用于具有四根导线的两相双极电机。在一个完整的驱动器/控制器中,电子器件交替地逆转每相的电流。所述的两相步进序列采用了 "双极线圈绕组"。每一阶段由一个单一的绕组组成。通过颠倒绕组中的电流,电磁极性被颠倒。下图中的电气原理图和步进顺序进一步说明了一个典型的两相双极驱动的输出级。如图所示,切换只是将流经绕组的电流逆转,从而改变该相的极性。
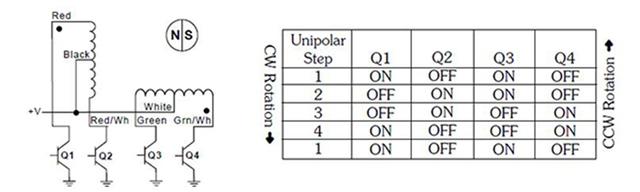
单极性驱动 单极绕组包括一个磁极上的两个绕组,以这样的方式连接,当一个绕组通电时,会产生一个北磁极,当另一个绕组通电时,会产生南磁极。这被称为单极性绕组,因为从驱动装置到线圈的电极性,即电流流动,永远不会逆转。
这种驱动需要一个在每一相(6根导线)有中心抽头的电机,驱动器不需要扭转每相的电流,而只需要将电流从每相的一个线圈切换到另一个线圈(如上图所示)。绕组是这样的,这种切换使电机内的磁场反转。这个选项使驱动器更简单,但在任何时候都只使用一半的铜绕组。与同等的双极电机相比,这导致旋转电机的可用扭矩或线性执行器的力大约减少30%,扭矩降低是因为通电的线圈与双极线圈相比,只利用了一半的铜。 L/R驱动器 这种类型的驱动器也被称为恒定电压驱动器。许多这类驱动器可以被配置为运行双极或单极步进电机。L/R代表了电感(L)与电阻(R)的电气关系。电机线圈阻抗与步进速率的关系由这些参数决定。L/R驱动器应将电源输出电压与电机线圈的额定电压 "匹配",以便连续工作。大多数公布的电机性能曲线是基于在电机引线上施加的全部额定电压。电源输出电压水平必须设置得足够高,以考虑到驱动电路内的电降,从而实现最佳的连续运行。 |