自动控制系统的原理
|
控制理论基础就是反馈控制理论,在各种控制系统中,要使被控量保持恒定值,必须对被控量的波动变化进行反馈,即将被控量实时值采集,与预先设定值进行对比计算其偏差大小,然后控制器根据偏差调节执行机构,使被控量逐步接近设定值,该被控量采集过程称为反馈,带有反馈的控制系统称为反馈控制系统,也可称为闭环控制系统。 若反馈信号与输入信号相减,使产生的偏差越来越小,则称为负反馈;若反馈信号与输入信号相加,使产生的误差增加,则称为正反馈。
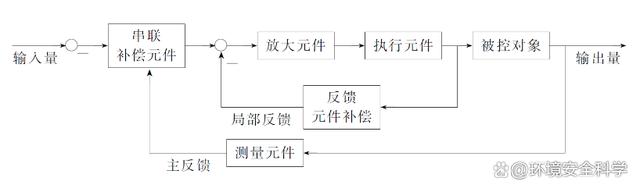
一个典型的反馈控制系统的基本组成可用图1-1所示的方块图表示。图中,用“○”代表比较元件,它将测量元件检测到的被控量与输入量进行比较;“-”号表示两者符号相反,即负反馈;“ ”号表示两者符号相同,即正反馈。信号从输入端沿箭头方向到达输出端的传输通路称前向通路;系统输出量经测量元件反馈到输入端的传输通路称主反馈通路。前向通路与主反馈通路共同构成主回路。此外,还有局部反馈通路以及由它构成的内回路。只包含一个主反馈通路的系统称单回路系统;含有两个或两个以上反馈通路的系统称为多回路系统。
图中输入量即为设定的目标值,使我们所期望的被控量需要稳定的状态;放大元件是将输入量与反馈量误差放大的装置,一般来说是放大电路,可将0~10mV的电压信号放大至0~10V;执行部件是可以调节的装置,通过调节执行部件可以改变被控量的大小,如阀门的开度和电机的频率;测量元件是能够采集被控量数值的装置,如浓度仪、粒度计等。 一般来说,加到反馈控制系统上的外作用有两种类型:一种是有用输入,另一种是扰动。有用输入决定系统被控量的变化规律,如输入量;而扰动是系统不希望有的外作用,它破坏有用输入对系统的控制。在实际系统中,扰动总是不可避免的,而且它可以作用于系统中的任何元部件上,也可能一个系统同时受到几种扰动作用。电源电压的波动、环境温度、压力以及负载的变化、飞行中气流的冲击、航海中的波浪等,都是现实中存在的扰动。 |