汽水混合器模型
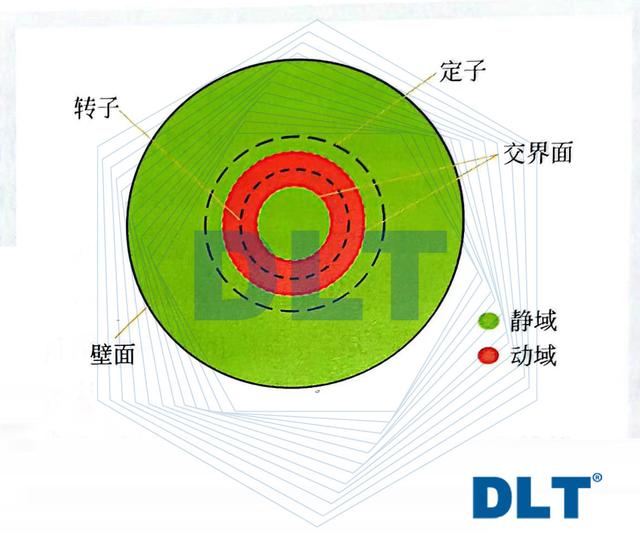
数值模拟计算在求解流体流动的控制方程组时通常采用静态(惯性)参考系或者动态(非惯性)参考系。汽水混合器是一种带旋转部件的设备,在数值模拟中,它会被分为不断旋转的动域和静止不动的静域两部分,需要使用动态参考系进行模拟。目前广泛用于处理动态参考系的三种模型是:单旋转参考系模型、多重参考系(Multi-Reference Frame,MRF)模型和滑移网格(Sliding Mesh,SM)模型。其中,汽水混合器的CFD模拟研究中常用的参考系模型为MRF模型和SM模型。 (1)MRF模型 MRF模型就是在求解时建立多个参考系,此方法通常根据动静件的结构将整个计算域分为静域和动域等多个部分,如图所示。在动域内使用旋转参考系构建和求解运动方程,在静域内使用静止参考系构建和求解运动方程。由于动静域计算所用的参考系不同,所以在动静域交界面处通常采用局部参考系转换的方法完成数据传递。虽然MRF模型是一种稳态近似,在动静件相互作用很强的系统中预测精度较差,但是在动静件相互作用较弱的系统中,其还是能获得良好的预测结果。例如,一些桨叶与挡板相互作用较弱的搅拌釜。当动静件相互作用很强时,为了获得精确的计算结果,必须使用SM模型来进行求解。此外,MRF模型的计算结果可以用作SM模型的初始流场,这会相应减小计算的时间加速收敛速度。
(2)SM模型 SM模型是在动静域交界面上,动域面与静域面不共用网格节点,在计算中两者是相互滑动的。虽然与MRF模型相似,模拟时都将计算域分为动域和静域两部分,但是与MRF模型将不同区域看作拟稳态并忽略动静域瞬态作用不同,SM模型基于非稳态并考虑动静域瞬态作用,所以SM模型用于动静件相互作用很强的系统中具有很好的预测效果。计算过程中,在每一个时间步长结束时,交界面上分别与动域面和静域面相连的网格随动域面与静域面滑动,在这一过程中会出现网格的破坏与重构;同时,在动静域交界面上动量、质量等通过守恒插值的方法进行传递,这会相应增加计算量,所以,采用SM模型的计算速度较MRF模型的慢。
|